iCAD × TwinCAT で制御検証
はじめに
制御検証をしたい方は、以下の記事を参照してください。
基本的には、他PLCとの接続も同じ要領になると思います。
- TwinCATのインストール
- TF6100 | TwinCAT3 OPC UAのインストール
- TwinCAT3でプロジェクト作成
- TwinCAT3 OPCUAサーバー
- TwinCAT3 OPCUAサーバーの確認
- iCAD動作設計と制御検証
- デバイスエクスプローラ インストールと設定
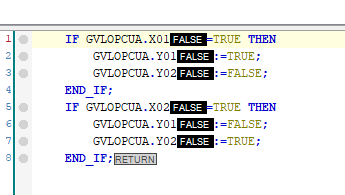
iCAD × TwinCATの結果はこのようになりました↓
これは仕様通りです。
前進型センサーがONしたら後退、後退型センサーがONしたら前進、という仕様のプログラムです。
それではすべてを連携させてみましょう。
アプリ起動
TwinCAT起動

- システムスタート

- ログイン

- 運転

- OPCUAサーバーコネクト

これでTwinCATは動作しています。
デバイスエクスプローラ起動
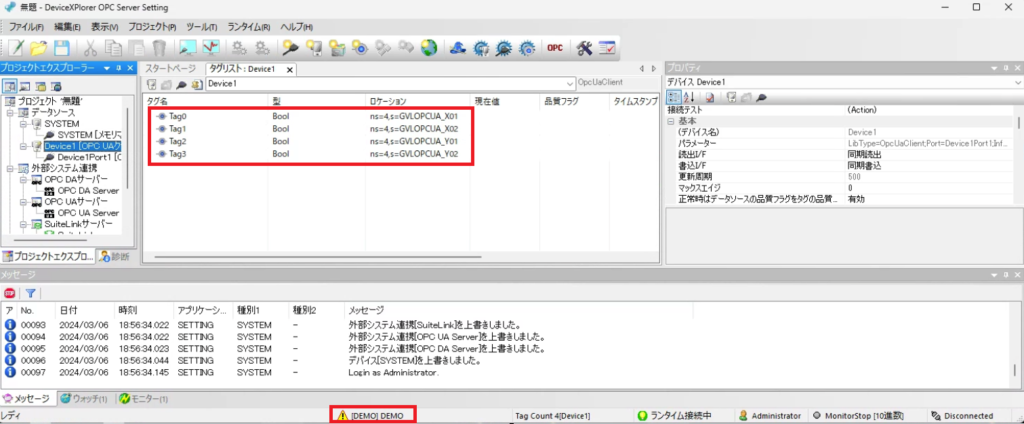
- こちらの記事での設定値を確認
- [DEMO]DEMOになっていることを確認
※STOPの場合、メニューバー「ランタイム」→「起動開始」
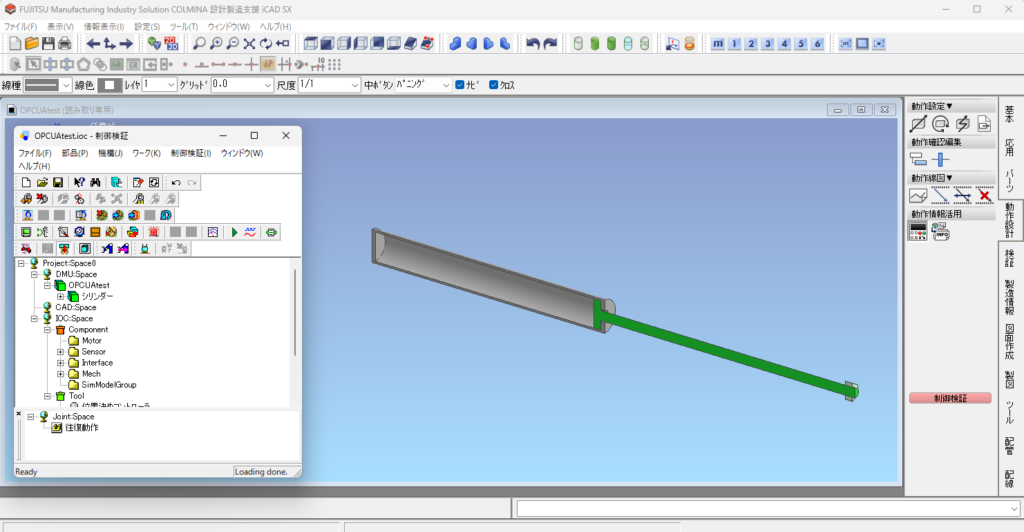
iCAD起動
読み取り専用でこちらの記事で作成したモデルを開いてください。
※読み取り専用での開き方はこちら
制御検証ファイルまで開いた状況にします。
スタートボタンを押すとシミュレーションウィンドウが出てきます。
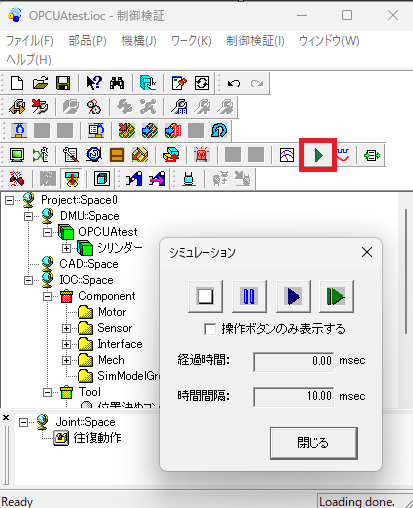
シミュレーションウィンドウのスタートボタンを押してください。

iCAD上でシリンダーが動作します!
お疲れさまでした。
iCAD図面
作成したiCAD図面は↓こちらに置いておきます。
[wpdm_package id=‘454’]
おまけ
TwinCATにOPCDA接続機能があったので、デバイスエクスプローラ無しでiCADとTwinCATの接続を試してみました。
結果はコネクトまではできたのですが、変数を見ることができず挫折しました(´・ω・`)…
もし出来るかもという方がいれば、教えてください。